注意:因为学习平台题目是随机,选择题选项也是随机,一定注意答案对应的选项,同学们在本页按“Ctrl+F”快捷搜索题目中“关键字”就可以快速定位题目,还是不懂的话可以看这个:快速答题技巧
一、2024年秋江苏开放大学机械创新设计形考作业二单选题答案
1、Ⅱ级杆组具有()个构件和()运动副。
A、4,6
B、2,4
C、4,8
D、2,3
学生答案:D
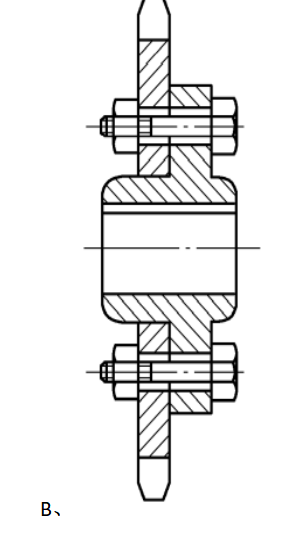
2、下列带轮机构中,孔板式的是()

学生答案:C
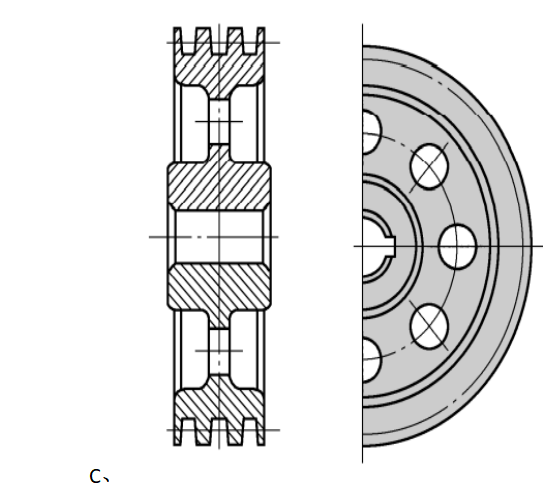
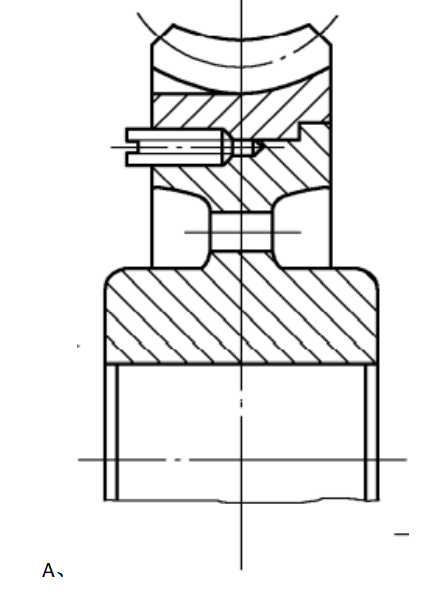
3、下图所示滚动轴承中为调心球轴承的是()
学生答案:D
4、相对机架运动的构件叫做()
A、移动副
B、活动构件
C、运动副
D、移动构件
学生答案:B
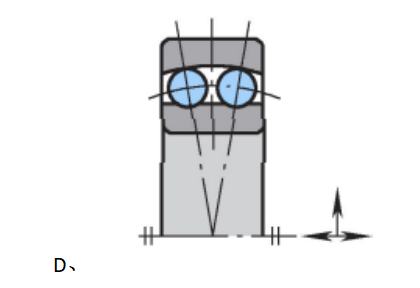
5、下列链轮机构中,组合式(螺栓联接)的是()
学生答案:B
6、下列蜗轮结构中,过盈配合联接式的是()
学生答案:A
7、下图中()为偏心轴
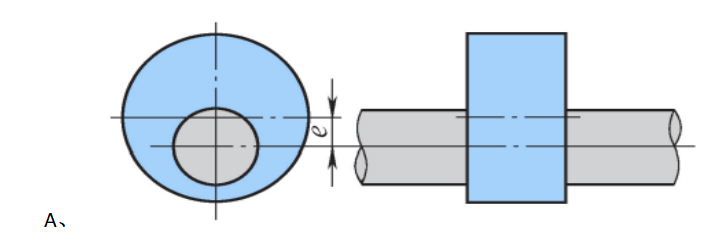
学生答案:A
8、机构具有确定运动的条件是机构的自由度()机构的原动件数目
A、大于
B、小于
C、等于
D、不确定
学生答案:C
9、在机构叠加组合中把支承其他机构的基本机构称为()
A、附加机构
B、基本机构
C、支撑机构
D、叠加机构
学生答案:B
10、自由构件在三维空间中有()个自由度。
A、7
B、6
C、5
D、4
学生答案:B
二、2024年秋江苏开放大学机械创新设计形考作业二多选题答案
1、常见的径向滑动轴承结构有()
A、对开式
B、整体式
C、调心式
D、剖分式
学生答案:B;C;D
2、下列属于3R类Ⅲ级杆组的有()
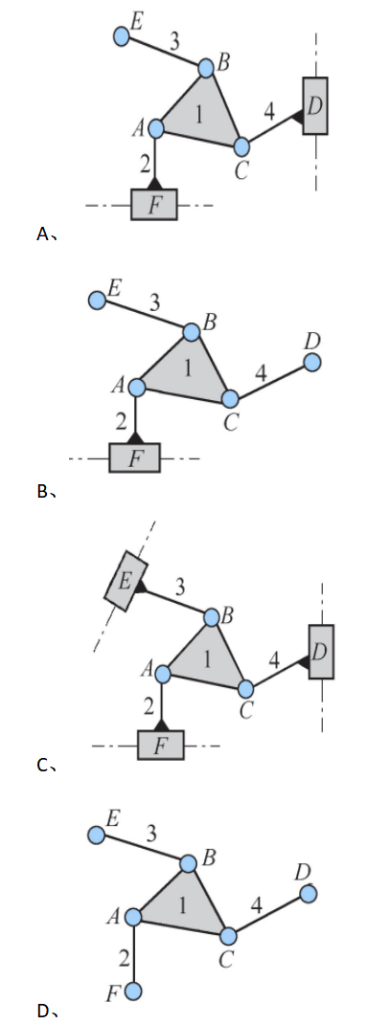
学生答案:A;B;C;D
3、链轮结构包括()
A、实心式
B、腹板式
C、组合式(焊接)
D、组合式(螺栓联接)
学生答案:A;B;C;D
4、机械零件计算机辅助反求设计的一般过程包括()
A、数控加工
B、数据采集
C、建立CAD模型
D、数据处理
学生答案:A;B;C;D
5、爬壁机器人对足机构的要求包括()
A、足机构足端的支承相直线位移便于控制
B、足机构具有足够的刚性和承载能力
C、足机构具有足够大的工作空间
D、足机构具有高自由度
学生答案:A;B;C
6、带轮结构包括()
A、实心式
B、轮辐式
C、孔板式
D、腹板式
 未经授权,禁止转载,发布者:形考达人
未经授权,禁止转载,发布者:形考达人 ,出处:https://www.xingkaowang.com/22731.html
,出处:https://www.xingkaowang.com/22731.html
免责声明:本站不对内容的完整性、权威性及其观点立场正确性做任何保证或承诺!付费为资源整合费用,前请自行鉴别。
免费答案:形考作业所有题目均出自课程讲义中,可自行学习寻找题目答案,本站内容可作为临时参考工具,但不应完全依赖,建议仅作为辅助核对答案的工具,而非直接使用!
