注意:因为学习平台题目是随机,选择题选项也是随机,一定注意答案对应的选项,同学们在本页按“Ctrl+F”快捷搜索题目中“关键字”就可以快速定位题目,还是不懂的话可以看这个:快速答题技巧
一、江苏开放大学机械创新设计形考作业一单选题答案23年秋
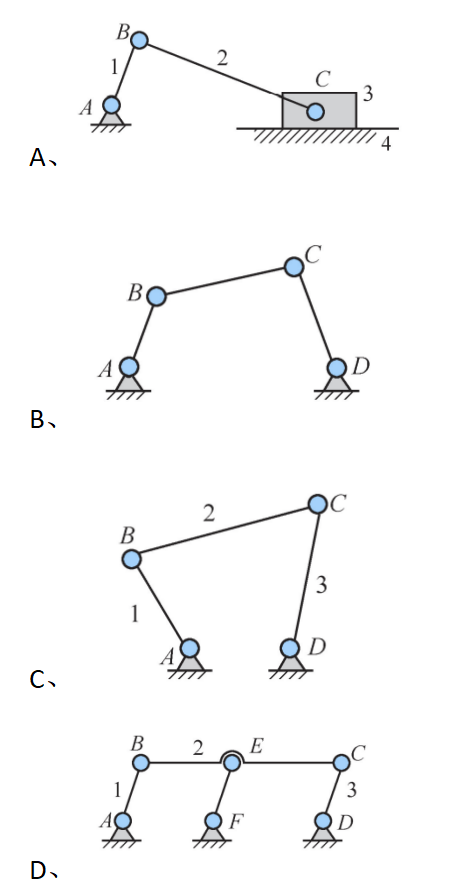
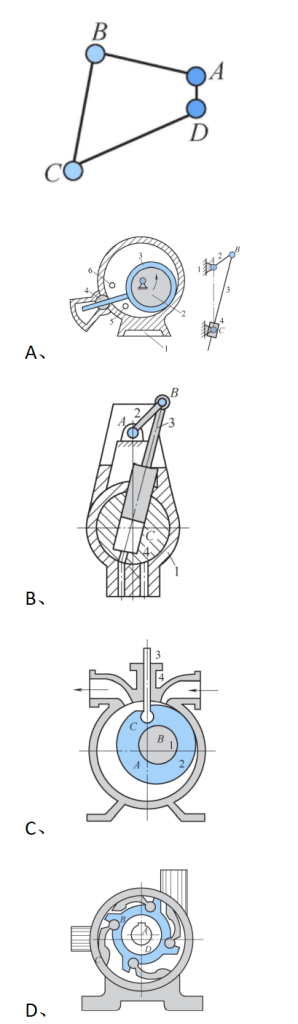
1、下图中,图( )为转动导杆机构
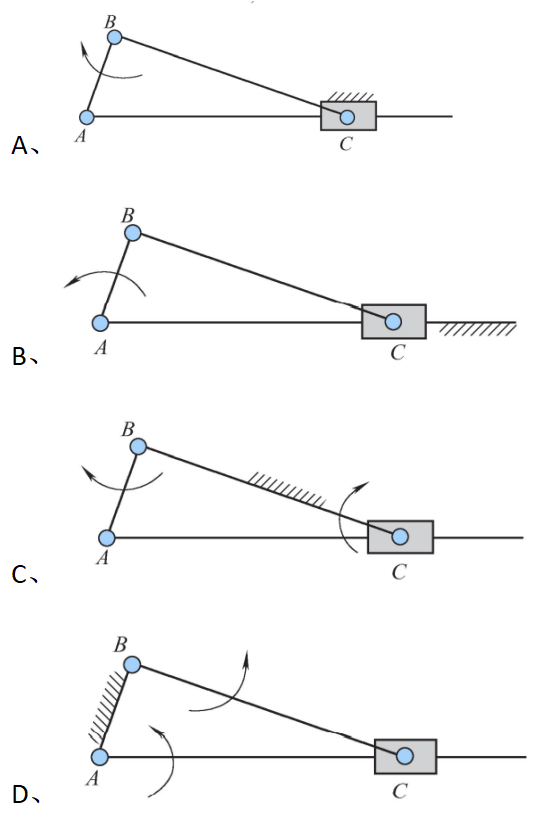

学生答案:D
2、直动从动件平面凸轮机构的基本型为( )
A、直动对心平底从动件平面凸轮机构
B、直动对心滚子从动件平面凸轮机构
C、直动偏置从动件平面凸轮机构
D、直动对心尖底从动件平面凸轮机构
学生答案:D
3、封闭组合的自由度为( )
A、2
B、4
C、1
D、3
学生答案:C
4、下图中为Ⅲ型封闭组合机构的式( )
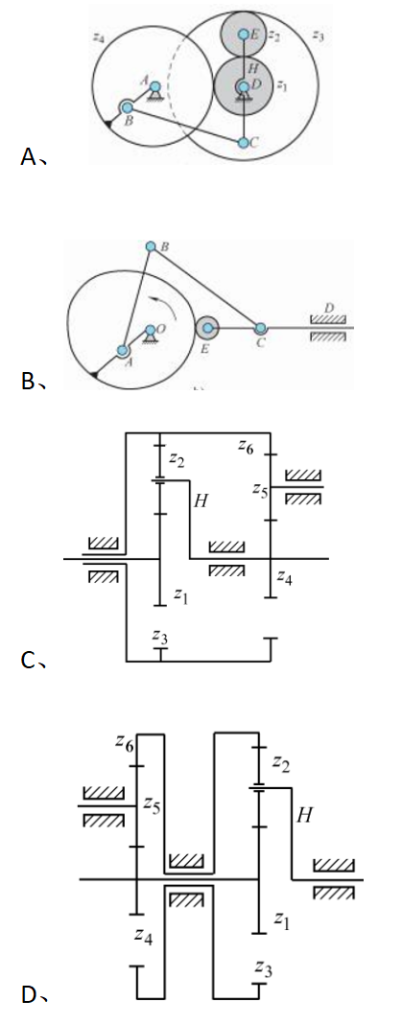
学生答案:C
5、机构具有确定运动的条件是机构的自由度等于机构的( )数目
A、原动件
B、运动副
C、构件
D、从动件
学生答案:A
6、下图所示为基本机构的( )
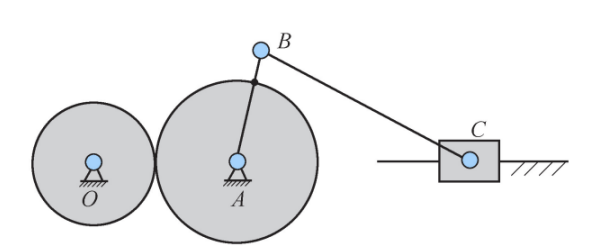
A、并联组合
B、迭加组合
C、串联组合
D、封闭组合
学生答案:C
7、含有一个移动副的四杆机构的基本型为( )
A、移动导杆机构
B、转动导杆机构
C、曲柄滑块机构
D、曲柄摇块机构
学生答案:C
8、下图所示为基本机构的( )
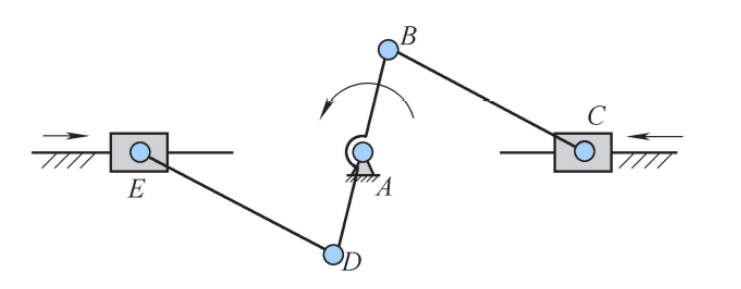
A、封闭组合
B、迭加组合
C、并联组合
D、串联组合
学生答案:C
9、下图中属于R2P类Ⅲ级杆组的是( )
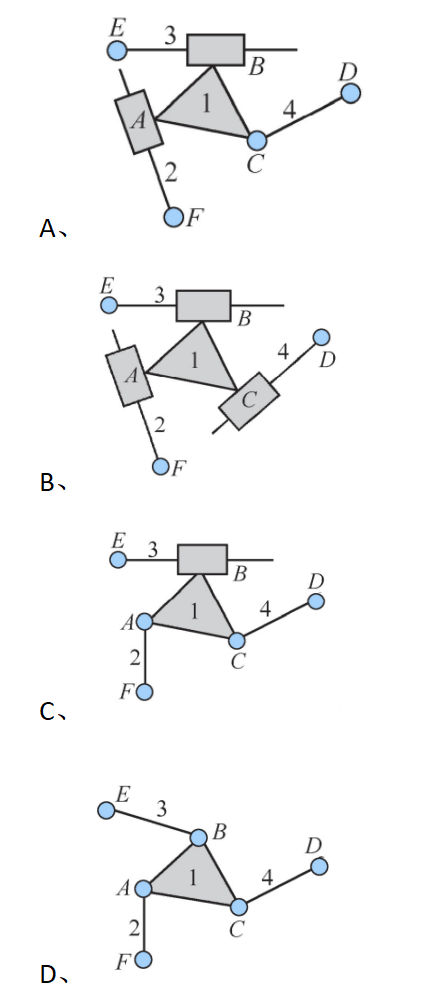
学生答案:A
10、运动副的等效代换过程中,机构的自由度( )
A、有可能变大也有可能变小
B、不变
C、变小
D、变大
学生答案:B
11、机架变换过程中,机构的构件数目( )
A、不变
B、变小
C、变大
D、有可能变大也可能变小
学生答案:A
12、下列机构中,能实现转动到移动的功能变换的是( )
A、摆动液压缸机构
B、齿轮齿条机构
C、曲柄摇杆机构
D、摩擦轮机构
学生答案:B
13、全转动副四杆机构的基本型为( )
A、双摇杆机构
B、曲柄滑块机构
C、曲柄摇块机构
D、双曲柄机构
学生答案:C
14、下图中,图( )为曲柄滑块机构的机构简图。
学生答案:A
15、齿轮传动机构的基本型为( )
A、斜齿圆柱齿轮传动机构
B、外啮合直齿圆柱齿轮传动机构
C、人字齿圆柱齿轮传动机构
D、内啮合直齿圆柱齿轮传动机构
学生答案:B
16、螺旋传动机构的基本型为( )
A、梯形型螺旋传动机构
B、矩形型螺旋传动机构
C、滚珠丝杠螺旋传动机构
D、三角型螺旋传动机构
学生答案:D
17、下图中属于Ⅱ型并联的是( )
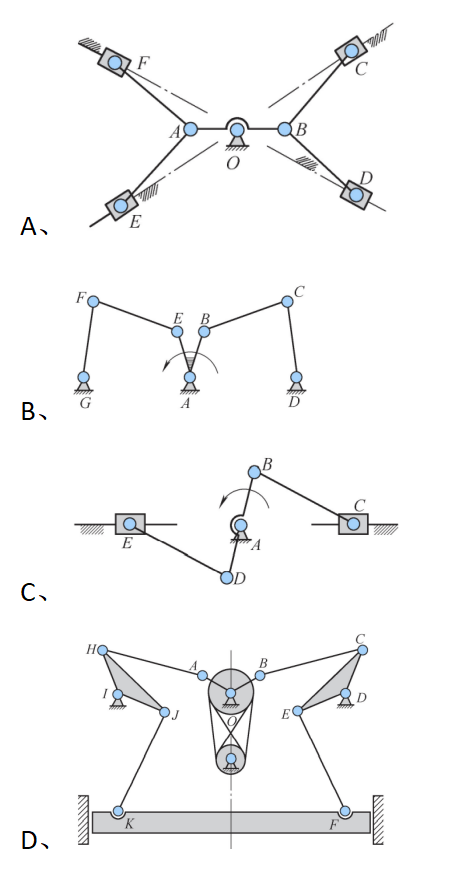
学生答案:A
18、含有两个移动副的四杆机构的基本型为( )
A、双转块机构
B、正弦机构
C、正切机构
D、双滑块机构
学生答案:B
19、锥齿轮传动机构的基本型为( )
A、曲齿锥齿传动机构
B、外啮合直齿锥齿传动机构
C、内啮合直齿锥齿传动机构
D、斜齿锥齿轮传动机构
学生答案:B
20、下图中属于3P类Ⅲ级杆组的是( )
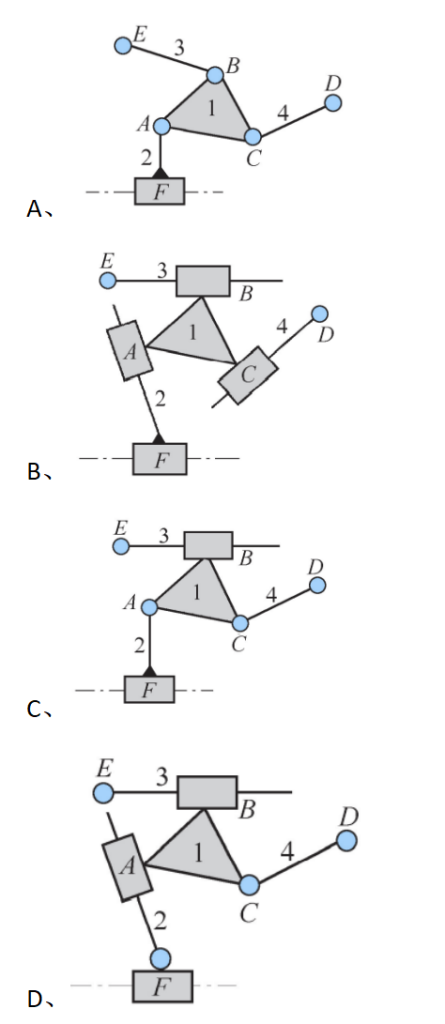
学生答案:B
二、、江苏开放大学机械创新设计形考作业一多选题答案23年秋
1、常用的空间机构主要有( )
A、球面副
B、螺旋副
C、圆柱副
D、球销副
学生答案:A;C;D
2、3R类Ⅲ级杆组可表示为( )
A、3R3R
B、3RP2R
C、3R3P
D、3R2PR
学生答案:A;B;C;D
3、下列机构中能实线转动到摆动的机构是( )
A、曲柄滑块机构
B、摆动导杆机构
C、曲柄摇杆机构
D、摆动从动件凸轮机构
学生答案:B;C;D
4、下列属于基本机构的是( )
A、齿轮机构
B、螺旋机构
C、摩擦轮机构
D、四杆机构
学生答案:A;B;C;D
5、并联组合的基本思路包括( )
A、改善机构受力状态
B、实线运动的分解与合成
C、对称并联相同的机构
D、同类型机构可以并联组合
学生答案:A;B;C;D
6、对于Ⅱ级杆组,当内接副为转动副是,可用( )表示。
A、RRP
B、RRR
C、RPR
D、PRP
学生答案:A;B;D
7、根据连接运动副的种类,四杆机构可分为( )
A、全转动副四杆机构
B、含有两个移动副的四杆机构
C、含有一个移动副的四杆机构
D、全移动副的四杆机构
学生答案:A;B;C
8、对下图所示的机构进行转动副的变异设计后演化为曲柄摇块机构的为( )
学生答案:A;B
9、根据从动件的运动形式和凸轮形状,凸轮机构可分为( )
A、直动从动件平面凸轮机构
B、直动从动件圆柱凸轮机构
C、摆动从动件圆柱凸轮机构
D、摆动从动件平面凸轮机构
学生答案:A;B;C;D
10、基本机构的连接组合方式主要有( )
A、封闭组合
B、串联组合
C、并联组合
D、迭加组合
学生答案:A;B;C;D
三、、江苏开放大学机械创新设计形考作业一填空题答案23年秋
1、下图所示,图a)为()封闭组合机构,图b)为()封闭组合机构,图c)为()封闭组合机构。
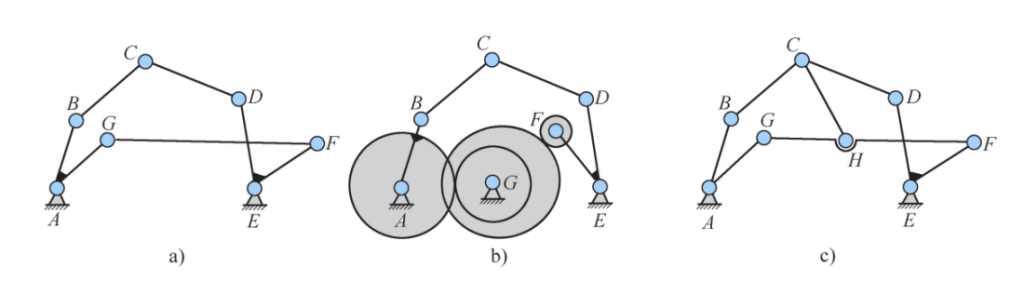
学生答案:I型;II型;III型
2、前一个机构的()与后一个机构的()刚性连接在一起,称之为串联组合。
学生答案:输出构件;输入构件
3、对于封闭式连接,基础机构为()自由度机构,附加机构为()自由度机构。
学生答案:二;单
4、当内接副为移动副时,Ⅱ级杆组可表示为(),()和()。
学生答案:RPR;PPR;PPP
5、下图中a)为()串联,b)为()串联。

学生答案:连接点选在做简单运动的构件(一般为连架杆),称为I型;连接点选在做复杂平面运动的构件上,称为II型
6、机构的迭加组合中支承其他机构的基本机构称为(),安装在基础机构可动件上面的机构称为()。
学生答案:基础机构;附加机构
7、各机构把()连接在一起,保留各自()的连接方式,称为Ⅰ型并联。
学生答案:输入运动;输出运动
8、2RP类Ⅲ级杆组可表示为(),(),()和()。
学生答案:2RP3R;2RP2RP;2RPR2P;2RP3P
四、江苏开放大学机械创新设计形考作业一简答题答案23年秋
1、利用机构组成原理进行机械创新设计的基本思路
学生答案:II级机构的综合方法、分析方法已经成熟,可优先考虑采用II级杆组进行机构的组合设计。 掌握II级杆组的6种基本形式,学会II级杆组的变异设计,图5-18b、c、d、e右侧所示仅是杆组变异的几种简单形式。 II级杆组的一个外接副连接活动构件,另外一个外接副连接机架,可获得单自由度的机构。 根据机构输出运动的方式选择杆组类型。输出运动为转动或摆动时,可优先选择两个以上转动副的杆组,如RRR、RPR、PRR等杆组;输出运动为移动时,可优先选择带有移动副的杆组,如RRP、PRP、RPP等杆组也能实现移动到摆动的运动变换。 连接杆组法只能实现机构运动方案的创新设计,实现具体的机构功能要求还需进行机构的尺度综合。综合过程与组杆的连接位置的确定有时需要反复进行,才能得到满意的设计结果。 连接杆组法也适合齿轮、凸轮等其他结构的组合设计 基本杆组的外接副也可直接连接到原动件上,此时可获得多自由度的机构。
2、运动副等效代换有哪几种形式?举例说明。
学生答案:运动副等效代换是指将一个运动副替换为另一种等效的运动副,以实现相同的运动功能。根据不同的情况,运动副等效代换可以有以下几种形式:
空间运动副与平面运动副的等效替换:
空间运动副是指在三维空间中进行运动的副件,如球面副、柱面副等。当需要将空间运动副等效替换为平面运动副时,可以使用等效的平面副来实现相同的运动功能。例如,将球面副等效替换为平面副时,可以使用等效的平面副,如平面滑块副或平面摆线副来实现相同的运动功能。
高副与低副的等效代换:
高副是指在运动过程中,副件之间的相对运动自由度较多的副件,如万向副、万向球副等。低副是指相对运动自由度较少的副件,如滑动副、转动副等。当需要将高副等效替换为低副时,可以通过限制高副的自由度来实现等效代换。例如,将万向副等效替换为转动副时,可以通过限制万向副的某个自由度来实现等效代换。
滑动摩擦副与滚动摩擦副的等效代换:
滑动摩擦副是指在运动过程中,副件之间通过滑动摩擦来实现相对运动的副件,如滑动副、滑动轴承等。滚动摩擦副是指通过滚动摩擦来实现相对运动的副件,如滚动副、滚动轴承等。当需要将滑动摩擦副等效替换为滚动摩擦副时,可以通过更换副件或添加滚动轴承等方式来实现等效代换。
举例说明:
空间运动副与平面运动副的等效替换:将球面副等效替换为平面滑块副,可以通过在球面副上添加一个平面滑块来实现相同的运动功能。
高副与低副的等效代换:将万向副等效替换为转动副,可以通过限制万向副的某个自由度,如固定其中一个转动轴,来实现等效代换。
滑动摩擦副与滚动摩擦副的等效代换:将滑动副等效替换为滚动副,可以通过更换滑动副为滚动副,如将滑动轴承替换为滚动轴承,来实现等效代换。
 未经授权,禁止转载,发布者:形考达人
未经授权,禁止转载,发布者:形考达人 ,出处:https://www.xingkaowang.com/15843.html
,出处:https://www.xingkaowang.com/15843.html
免责声明:本站不对内容的完整性、权威性及其观点立场正确性做任何保证或承诺!付费为资源整合费用,前请自行鉴别。
免费答案:形考作业所有题目均出自课程讲义中,可自行学习寻找题目答案,本站内容可作为临时参考工具,但不应完全依赖,建议仅作为辅助核对答案的工具,而非直接使用!
